





Je suis un écrivain indépendant qui couvre la programmation et les logiciels.
Je suis étudiant en informatique et je m'intéresse à la programmation, aux logiciels et à la technologie
Comment Xod vous aide-t-il à construire des robots Arduino sans codage
Added 2019-05-27
Se lancer dans le bricolage La robotique Arduino peut être intimidante si vous n’avez jamais codé auparavant. Quelles que soient vos idées, si vous ne pouvez pas programmer votre microcontrôleur, votre robot ne fera pas grand chose.
Heureusement, il existe des moyens de programmer votre Arduino sans écrire une seule ligne de code. Nous nous intéressons aujourd'hui à la robotique de base utilisant Xod, un IDE compatible Arduino basé sur un nœud de programmation ouvert.
Le robot sans code
Le projet d’aujourd’hui utilise des composants robotiques de loisir standard pour créer un prototype de bras de robot à détection de distance. La combinaison d'un servo et d'un capteur de distance à ultrasons est courante dans la robotique amateur et vous allez ajouter un écran LCD.
Le projet terminé enregistre les valeurs de distance sur l'écran LCD et déplace le bras de servo proportionnellement à la distance détectée par le détecteur de distance.
Avec un peu d'imagination, c'est un bras de robot qui essaie de vous saisir si vous vous approchez trop près. Effrayant!
Exigences matérielles
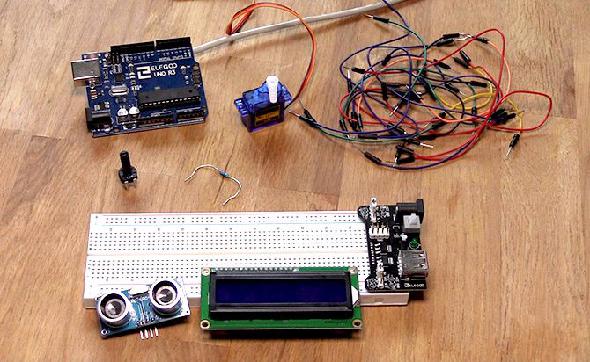
Tu auras besoin de :
- Carte compatible Arduino (ce projet utilise un Uno)
- Écran LCD 16 × 2
- Capteur de distance à ultrasons HC-SR04
- Hobby Servo
- Potentiomètre 10k
- Résistance de 220 ohms
- Alimentation 5v
- Planche à pain et fils de connexion
Il y a pas mal de composants requis pour ce projet, mais tout bon kit de démarrage Arduino devrait avoir tout ce dont vous avez besoin. J'ai trouvé tout ce dont j'avais besoin dans le Kit de démarrage Elegoo Uno R3 . Sinon, tous les composants énumérés ci-dessus sont très bon marché et disponibles chez tous les bons détaillants d'électronique grand public.
Configuration de l'écran LCD
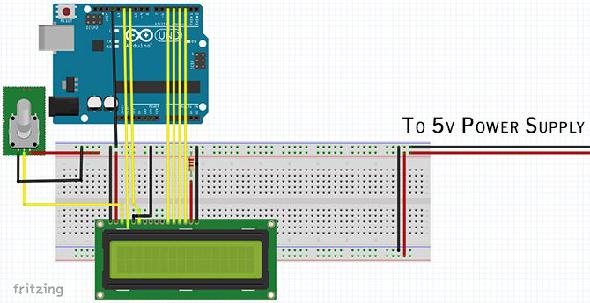
Ajoutez votre écran LCD, votre potentiomètre 10k et votre résistance 220 ohms à la planche à pain conformément au diagramme de Fritzing ci-dessus.
Configurer un écran LCD peut être assez intimidant la première fois que vous le faites, mais continuez à vous référer au diagramme et vous l’obtiendrez! Pour simplifier les choses, j’ai configuré les broches LCD et Arduino de la même manière que dans le tutoriel officiel LCD Arduino alors référez-vous à cela aussi si vous êtes bloqué.
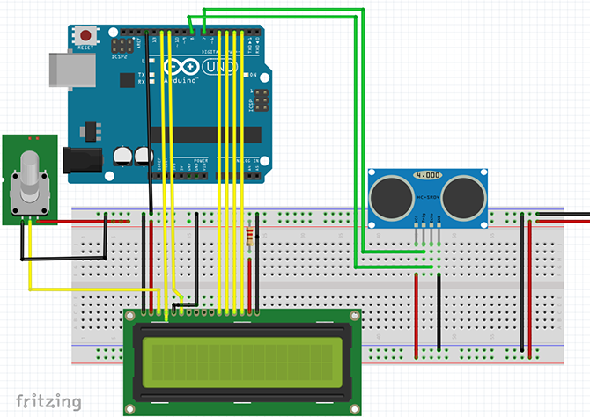
Ajout du capteur servo et ultrasonique
Ajoutez maintenant votre capteur à ultrasons HC-SR04 à la planche à pain. Connectez le VCC et GND des épingles aux rails 5v et au sol de la planche à pain. Connectez le Trigonométrie broche à broche Arduino 7 , et le Écho épingler à 8 .
Ensuite, attachez votre servo. Les couleurs de câblage peuvent varier ici, mais en règle générale rouge se connecte à la 5v épingle, et marron ou noir attacher au GND épingle. La ligne de données, qui est généralement jaune ou Orange , se connecte à broche 10 .
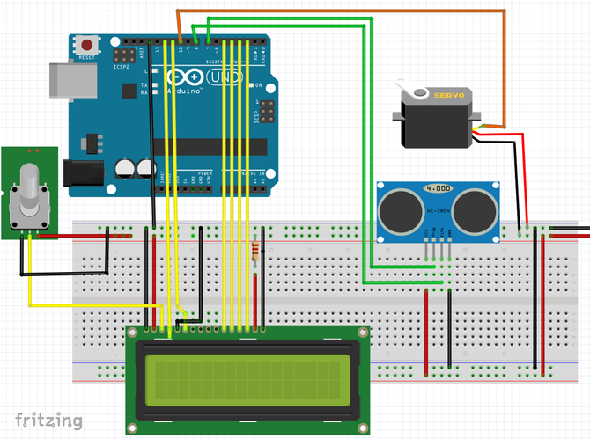
Enfin, connectez le rail au sol de la planche à pain à l’un des câbles Arduino GND des épingles. C'est tout! Vous êtes tous mis en place.
Téléchargement de l'EDI Xod
Rendez-vous sur Xod.io et téléchargez l'EDI gratuit Xod. Il est disponible pour Windows, Mac et Linux. Il existe également une version basée sur un navigateur, mais comme vous ne pouvez pas l'utiliser pour télécharger des esquisses Arduino, elle ne fonctionnera pas pour ce projet.
Télécharger: Xod IDE pour Windows, Mac et Linux
Cligner des yeux avec Xod
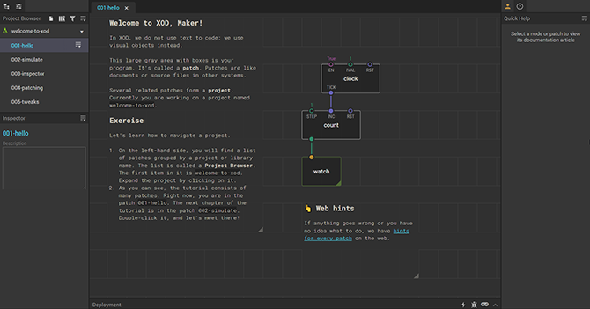
Lorsque vous ouvrez Xod pour la première fois, vous verrez le projet de tutoriel. sinon, vous pouvez l'ouvrir sous le Aidez-moi menu. Déplier le bienvenue-à-Xod collection dans le navigateur de projet à gauche, et sélectionnez 101-upload .
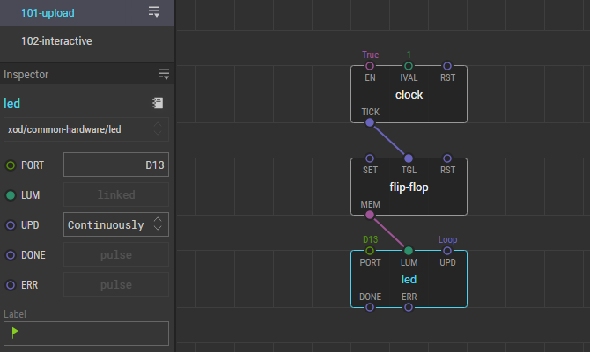
Cette configuration de nœud est destinée à tester si le code est correctement téléchargé sur l’Arduino. Il fonctionne de la même manière qu’un croquis Blink dans l’EDI Arduino. le l'horloge noeud crée un signal chaque seconde. Ceci se connecte à la Tongues noeud, qui bascule entre vrai et faux chaque fois qu'il reçoit le signal. La sortie de la bascule se connecte à la LED nœud, éteindre et sur.
Cliquez sur le nœud led et vous verrez les modifications du panneau Inspecteur afficher ses paramètres. Changer la Port 13, comme indiqué ci-dessus, la broche avec une DEL intégrée sur un Arduino. Notez que Xod transforme automatiquement 13 en D13 . Vous n’avez pas besoin de taper le D vous-même, mais cela n’a aucune incidence sur ce tutoriel!
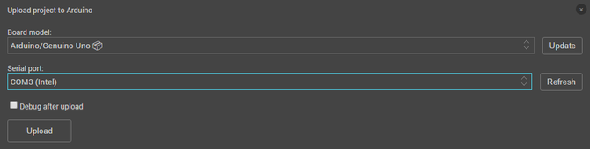
Pour vérifier si cela fonctionne, connectez votre Arduino via USB, allez à Déployer> Transférer sur Arduino et sélectionnez le type de carte et le port COM appropriés.
Si vous voyez la DEL Arduino clignoter, vous êtes prêt à partir! Sinon, vérifiez votre numéro de carte et de port et testez à nouveau avant de continuer.
Programmation de l'écran LCD
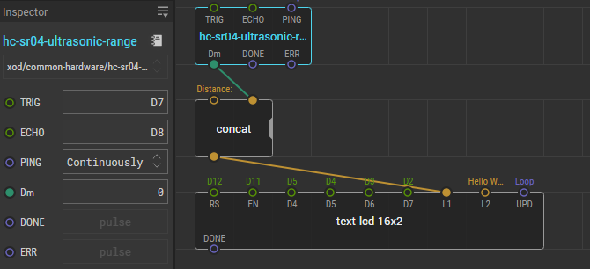
Habituellement, nous entrons maintenant dans le long processus de codage, mais puisque nous utilisons Xod, nous n’en écrirons aucun. Dans le navigateur du projet, sélectionnez texte-lcd-16 × 2 Vous le trouverez sous xod / common-hardware . Faites-le glisser dans votre programme et utilisez l'inspecteur pour le configurer avec les broches comme indiqué.
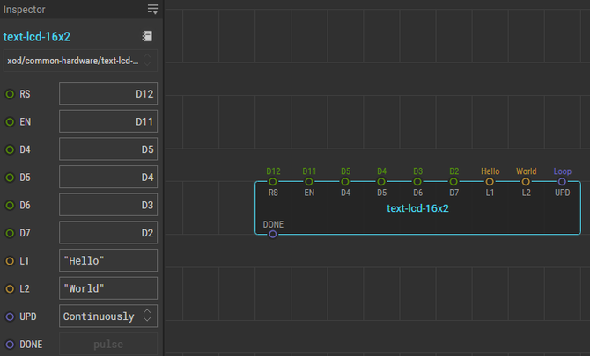
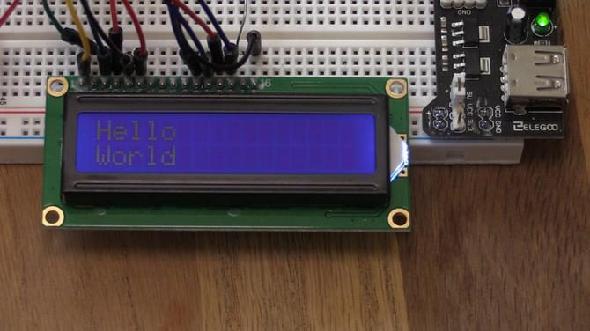
L1 est la première ligne de l'écran LCD, et L2 est le deuxième, pour l’instant, nous avons codé «Hello World» pour vérifier que tout fonctionne. Déployez votre programme sur l’Arduino pour le voir fonctionner. Si votre texte est difficile à lire, essayez de tourner le potentiomètre 10k pour régler le contraste de l'écran LCD.
Maintenant, configurez le capteur de distance et faites-le communiquer avec l'écran LCD.
Détection de distance
Faites glisser le gamme hc-sr04 nœud dans votre projet et définissez la TRIGONOMÉTRIE et ÉCHO épingles à 7 et 8 pour correspondre à la façon dont vous l'avez configuré plus tôt.
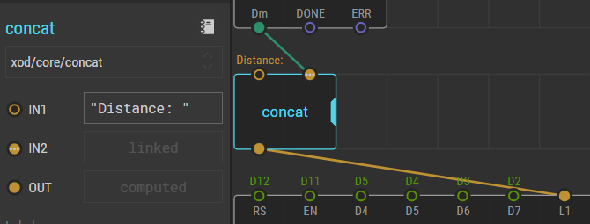
Vous trouverez le concat noeud sous xod / core dans le navigateur du projet. Faites-le glisser entre votre nœud de capteur de distance à ultrasons et le nœud LCD. Vous allez utiliser ceci pour concaténer (ce qui est un mot de fantaisie pour combiner) la lecture du capteur de distance avec votre propre texte.
Cette image montre ce qui se passe. le Dm la sortie du noeud du capteur de distance est branchée sur EN 2 , et vous pouvez voir que l'inspecteur le marque comme lié . Type "Distance:" dans le EN 1 boîte. Maintenant, liez la sortie du noeud concat à L1 du noeud LCD.
Enregistrez et déployez le programme modifié. La ligne supérieure de l'écran LCD affiche maintenant la lecture du capteur de distance!

Configuration du servo
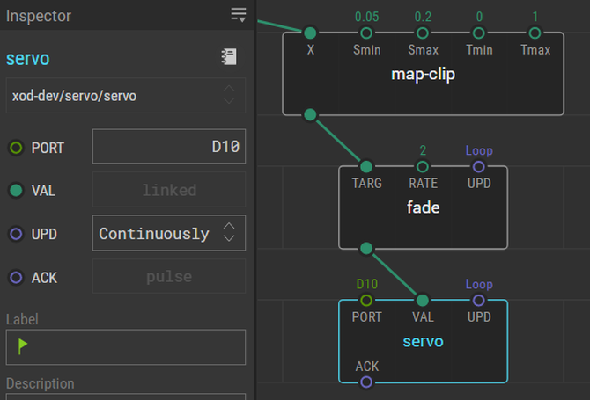
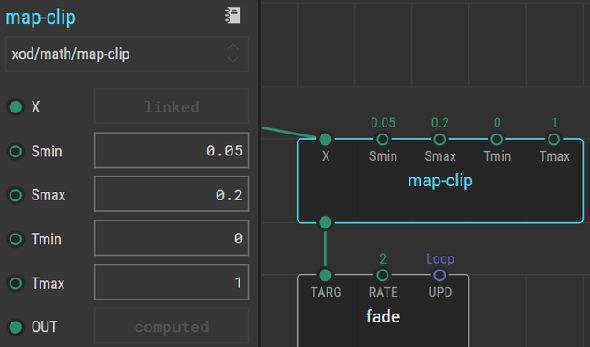
Pour démarrer le servo, il faut trois parties, alors parcourons-les une à une. Commencez par faire glisser un carte-clip noeud de xod / math dans votre programme. Ce nœud prend des informations de la Dm sortie du nœud du capteur de distance et le mappe aux valeurs comprises par le servo.
Smin
et
Smax
représentent la plage minimum et maximum pour activer le servo, dans ce cas entre 5 et 20 cm. Ces valeurs sont mappées sur
Tmin
et
Tmax
, qui sont réglés sur 0 et 1 comme position minimum et maximum du servo.
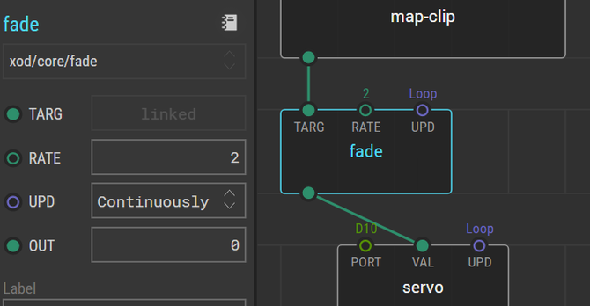
le se faner noeud sous xod / core prend la valeur de sortie du nœud map-clip et la lisse à un niveau défini taux . Cela empêche tout mouvement indésirable du servo saccadé. Un taux de 2 est un bon équilibre, mais vous pouvez expérimenter ici différentes valeurs pour que le servo réagisse plus vite et plus lentement.
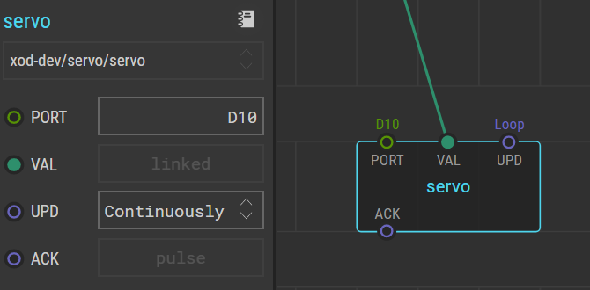
Finalement, le servo noeud, que vous trouverez sous xod-dev / servo , prend la valeur de sortie du noeud de fondu. Changer le port en dix . Tu peux partir UPD sur Continuellement car nous voulons que notre servo soit constamment mis à jour en fonction du capteur de distance.
Enregistrez votre script et déployez-le sur la carte Arduino. Votre bras robotique prototype est terminé!
Le tester
Désormais, lorsque vous placez quelque chose à proximité du capteur de distance, l'écran LCD enregistre la distance et le servo se déplace proportionnellement à la distance détectée. Tout cela sans aucun code.
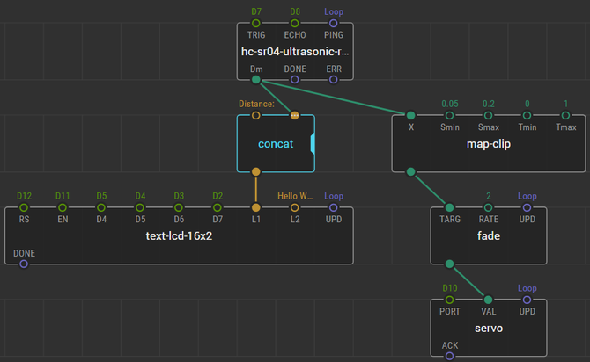
L'arborescence complète des noeuds montre à quel point il est simple de créer des programmes complexes dans Xod. Si vous rencontrez des problèmes, vérifiez à la fois votre circuit et chaque nœud pour rechercher les erreurs éventuelles.
Le robot Arduino sans code
Xod permet à quiconque de programmer des cartes Arduino, quelles que soient leurs connaissances en matière de codage. Xod fonctionne même avec le Blynk DIY IoT application, rendant une maison intelligente bricolage sans code complet une possibilité réelle.
Voulez-vous apprendre le codage de base? Essayez 5 applications de codage au format Bite pendant votre temps libre
Vous voulez apprendre le codage de base mais avez peu de temps? Ces applications de codage miniatures ne prendront que quelques minutes de votre journée bien remplie.
Read Article